AI机器人第六周作业
传感器介绍与 ROS2 KITTI 实验
效果图
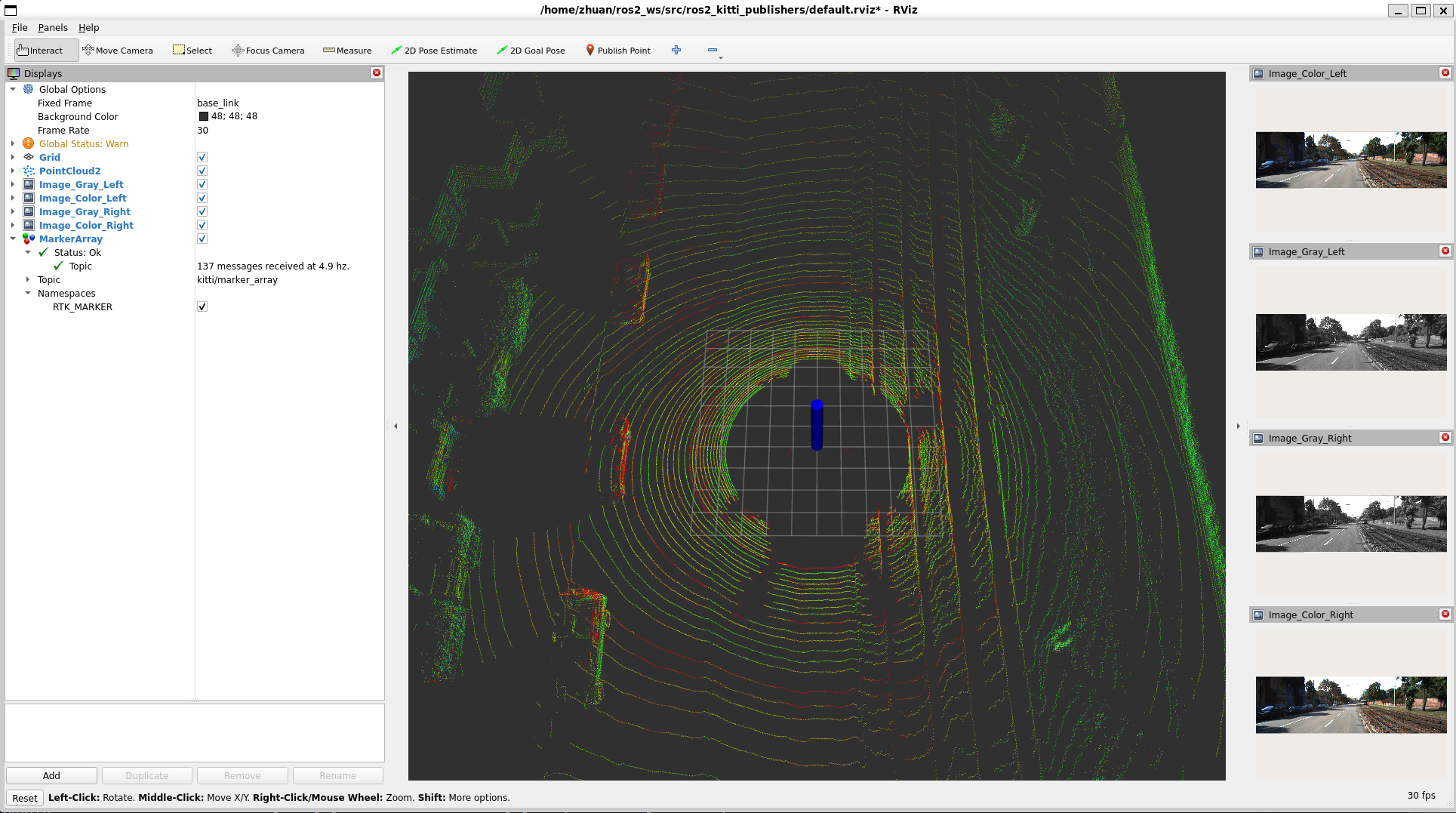
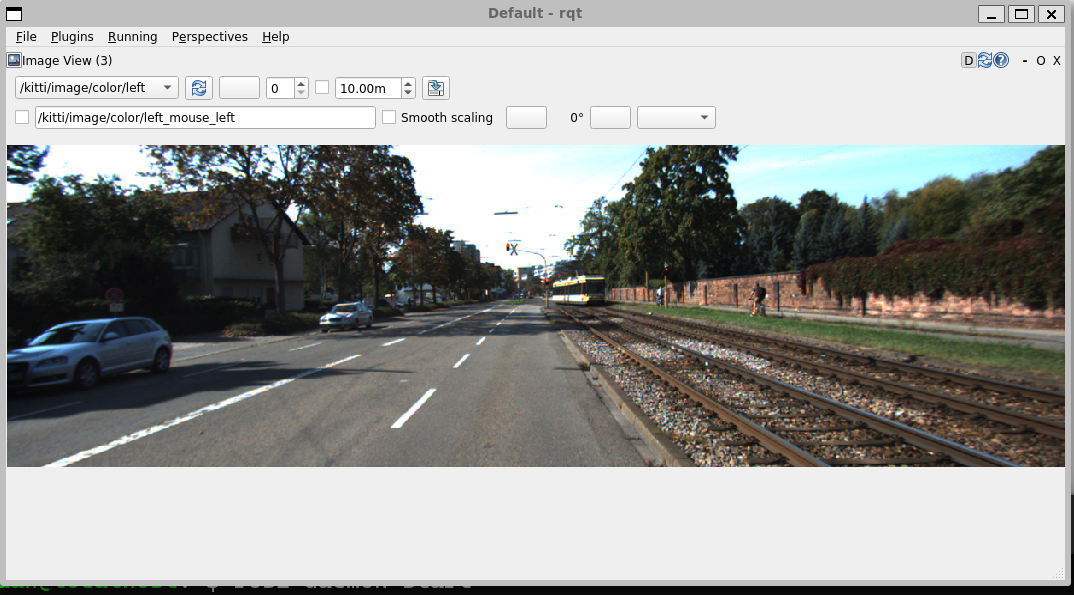
操作过程:<p>
1.终端运行
cd ~/ros2_ws
colcon build --cmake-clean-cache
source ./install/setup.bash
ros2 run ros2_kitti_publishers kitti_publishers
2.另一个终端运行
ros2 daemon start
rqt
1.终端运行
cd ~/ros2_ws
colcon build --cmake-clean-cache
source ./install/setup.bash
ros2 run ros2_kitti_publishers kitti_publishers
2.另一个终端运行
ros2 daemon start
rqt