AI机器人第五周作业
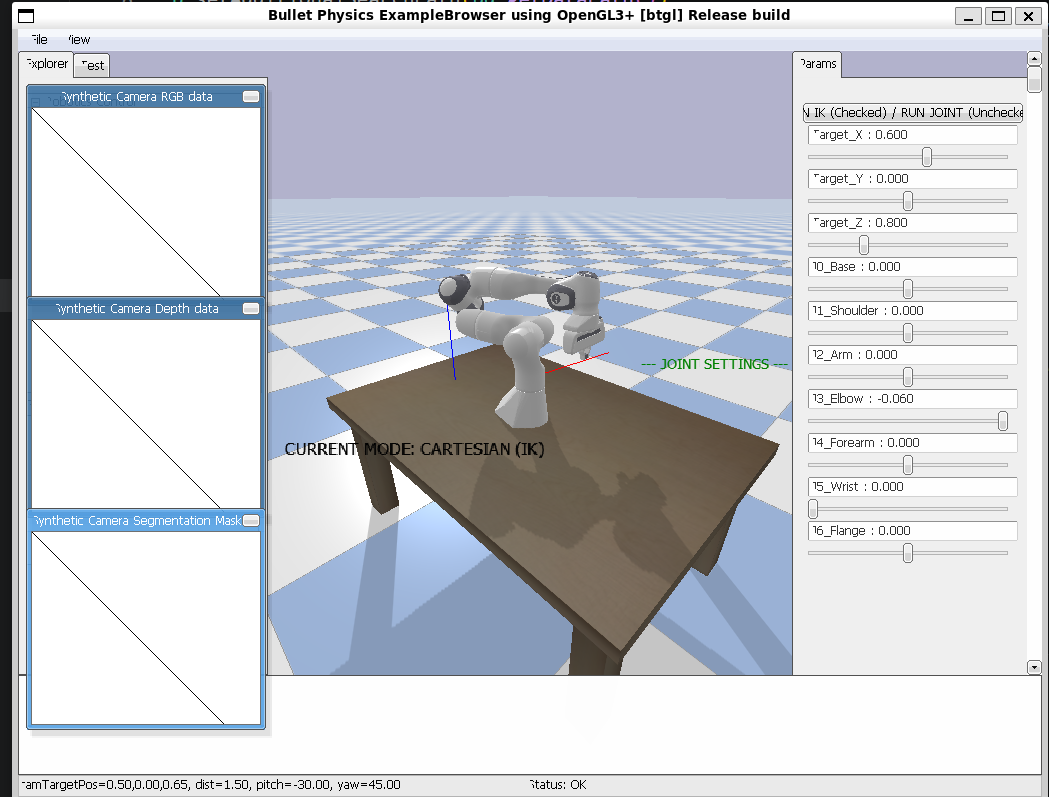
操作机械臂走直线<p>
源代码:<p>
import pybullet as p
import pybullet_data as pd
import time
import math
# --- 1. 환경 초기화 | 环境初始化 | Environment Initialization ---
p.connect(p.GUI)
p.setAdditionalSearchPath(pd.getDataPath())
p.setGravity(0, 0, -9.8) # 표준 Z-Up 중력 | 标准Z轴重力 | Standard Z-Up gravity
p.configureDebugVisualizer(p.COV_ENABLE_GUI, 1)
# 카메라 위치 설정 | 设置摄像头视角 | Set camera view
p.resetDebugVisualizerCamera(1.5, 45, -30, [0.5, 0, 0.65])
# 지면 및 테이블 로드 | 加载地面与桌子 | Load plane and table
p.loadURDF("plane.urdf")
table_pos = [0.5, 0, 0]
p.loadURDF("table/table.urdf", table_pos, useFixedBase=True)
# 로봇 암 로드 (테이블 위에 고정) | 加载并固定机器人 | Load & fix robot on table
panda_pos = [0.5, 0, 0.625] # Z=0.625는 테이블 높이 | 桌面高度 | Table height
pandaId = p.loadURDF("franka_panda/panda.urdf", panda_pos, useFixedBase=True)
init_joint_positions = [0, -0.4, 0, -2.0, 0, 1.6, 0]
for i in range(7):
p.resetJointState(pandaId, i, init_joint_positions[i])
p.setJointMotorControl2(
pandaId,
i,
p.POSITION_CONTROL,
targetPosition=init_joint_positions[i],
force=500
)
p.stepSimulation()
time.sleep(0.1)
# --- 2. 컨트롤 패널 생성 | 创建控制面板 | Create Control Panel ---
# 모드 전환 스위치 (체크 시 IK 모드) | 模式切换开关 | Mode toggle (Checked = IK)
mode_toggle = p.addUserDebugParameter("RUN IK (Checked) / RUN JOINT (Unchecked)", 1, 0, 1)
# A. 데카르트 좌표계 슬라이더 | 笛卡尔坐标滑块 | Cartesian Sliders (X, Y, Z)
p.addUserDebugText("--- CARTESIAN SETTINGS ---", [1.2, 0.5, 1.2], [0,0,1], 1)
ctrl_x = p.addUserDebugParameter("Target_X", 0.3, 0.8, 0.6)
ctrl_y = p.addUserDebugParameter("Target_Y", -0.4, 0.4, 0.0)
ctrl_z = p.addUserDebugParameter("Target_Z", 0.65, 1.2, 0.8)
# B. 관절 공간 슬라이더 | 关节空间滑块 | Joint Space Sliders (J0-J6)
p.addUserDebugText("--- JOINT SETTINGS ---", [1.2, -0.5, 1.2], [0,0.5,0], 1)
joint_params = []
joint_names = ["J0_Base", "J1_Shoulder", "J2_Arm", "J3_Elbow", "J4_Forearm", "J5_Wrist", "J6_Flange"]
# Panda 관절 한계 설정 | 关节限位设置 | Joint limits for Panda
joint_limits = [(-2.89, 2.89), (-1.76, 1.76), (-2.89, 2.89), (-3.07, -0.06), (-2.89, 2.89), (-0.01, 3.75), (-2.89, 2.89)]
for i in range(7):
joint_params.append(p.addUserDebugParameter(joint_names[i], joint_limits[i][0], joint_limits[i][1], 0.0))
info_id = -1 # 디버그 텍스트 ID | 调试文本ID | Debug text ID
start_pos = [0.5, 0.0, 0.8]
end_pos = [0.7, 0.2, 0.9]
t = 0.0
step = 0.002
direction = 1
prev_pos = start_pos
# --- 3. 메인 로직 루프 | 核心逻辑循环 | Main Logic Loop ---
try:
while True:
# 스위치 상태 확인 | 读取开关状态 | Read mode toggle state
run_ik = p.readUserDebugParameter(mode_toggle)
if run_ik > 0.5:
# ======= 모드 1: 역운동학 (IK) | 模式1: 逆向运动学 | Mode 1: Inverse Kinematics =======
tx = start_pos[0] + t * (end_pos[0] - start_pos[0])
ty = start_pos[1] + t * (end_pos[1] - start_pos[1])
tz = start_pos[2] + t * (end_pos[2] - start_pos[2])
# IK 계산: 목표 좌표 -> 관절 각도 | 计算关节角度 | Calculate joint angles from XYZ
joint_poses = p.calculateInverseKinematics(
pandaId, 11, [tx, ty, tz],
p.getQuaternionFromEuler([math.pi, 0, 0]) # 집게가 아래를 향하도록 설정 | 保持夹爪向下 | Gripper face down
)
# 모터 제어 적용 | 应用电机控制 | Apply motor control
for i in range(7):
p.setJointMotorControl2(pandaId, i, p.POSITION_CONTROL, joint_poses[i], force=500)
t += step * direction
if t >= 1.0 or t <= 0.0:
direction *= -1
p.addUserDebugLine(prev_pos, [tx, ty, tz], [1, 0, 0], 2)
prev_pos = [tx, ty, tz]
mode_str = "CURRENT MODE: CARTESIAN (IK)"
else:
# ======= 모드 2: 관절 직접 제어 (FK) | 模式2: 关节直接控制 | Mode 2: Joint Direct Control =======
for i in range(7):
target_val = p.readUserDebugParameter(joint_params[i])
p.setJointMotorControl2(pandaId, i, p.POSITION_CONTROL, target_val, force=500)
mode_str = "CURRENT MODE: JOINT SPACE (Direct)"
# --- 4. 데이터 피드백 표시 | 数据反馈显示 | Data Feedback Display ---
# 엔드 이펙터 실제 위치 획득 (순운동학 결과) | 获取末端实际位置 | Get actual EE position (FK result)
ee_state = p.getLinkState(pandaId, 11)
curr_p = ee_state[0]
# 실제 관절 각도 읽기 | 读取实际关节角度 | Read actual joint states
curr_j = [p.getJointState(pandaId, i)[0] for i in range(7)]
# 화면 텍스트 업데이트 | 更新屏幕文本 | Update screen text
if info_id != -1:
p.removeUserDebugItem(info_id)
display_text = f"{mode_str}\n"
display_text += f"End-Effector [X,Y,Z]: [{curr_p[0]:.2f}, {curr_p[1]:.2f}, {curr_p[2]:.2f}]\n"
display_text += "-"*30 + "\n"
display_text += "Real-time Joints (rad):\n" + "\n".join([f"J{i}: {curr_j[i]:.2f}" for i in range(7)])
# 텍스트 위치 및 색상 설정 | 设置文本位置与颜色 | Set text position and color
info_id = p.addUserDebugText(display_text, [0.4, -0.8, 0.8], [0,0,0], 1.2)
p.stepSimulation() # 시뮬레이션 한 단계 진행 | 步进仿真 | Step simulation
time.sleep(1./120.) # 실행 속도 조절 | 控制运行频率 | Control execution frequency
except Exception as e:
print(f"Error occurred: {e}")
finally:
p.disconnect() # 연결 종료 | 断开连接 | Disconnect