AI机器人第二周作业
ROS2基本命令介绍和通信机制基础
效果图<p>
操作步骤<p>
1.ubnutu安装ROS2
wget http://fishros.com/install -O fishros && bash fishros;2.验证安装
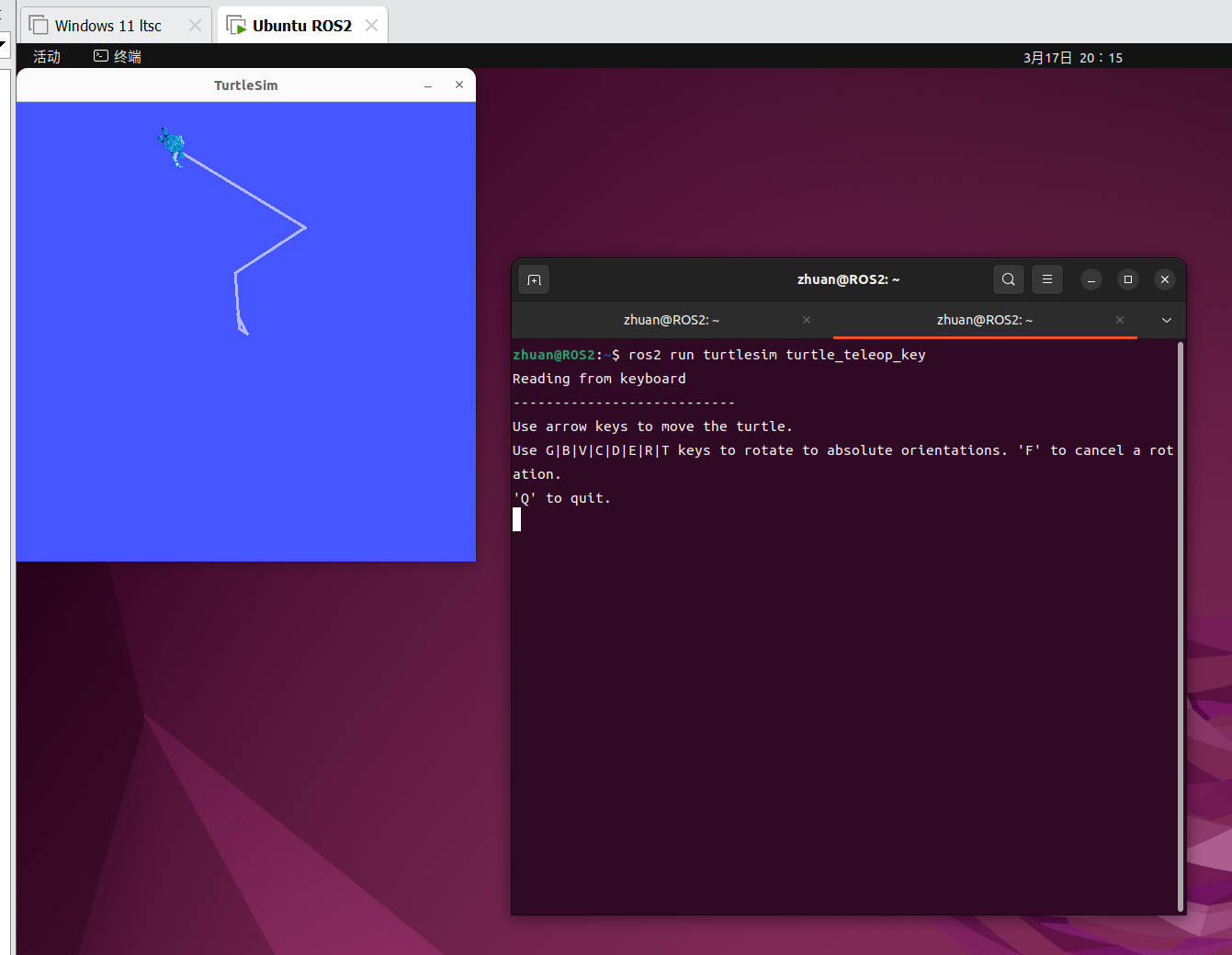
(1)打开终端
ros2 run turtlesim turtlesim_node(2)新开一个终端运行
ros2 run turtlesim turtle_teleop_key3.安装openclaw
curl -fsSL https://openclaw.ai/install.sh | bash 启动小龙虾
openclaw gateway