AI机器人第十二周作业
四足机器人入门
效果图&演示动画
| 效果图 | 演示动画 |
| —— | ——– |
| 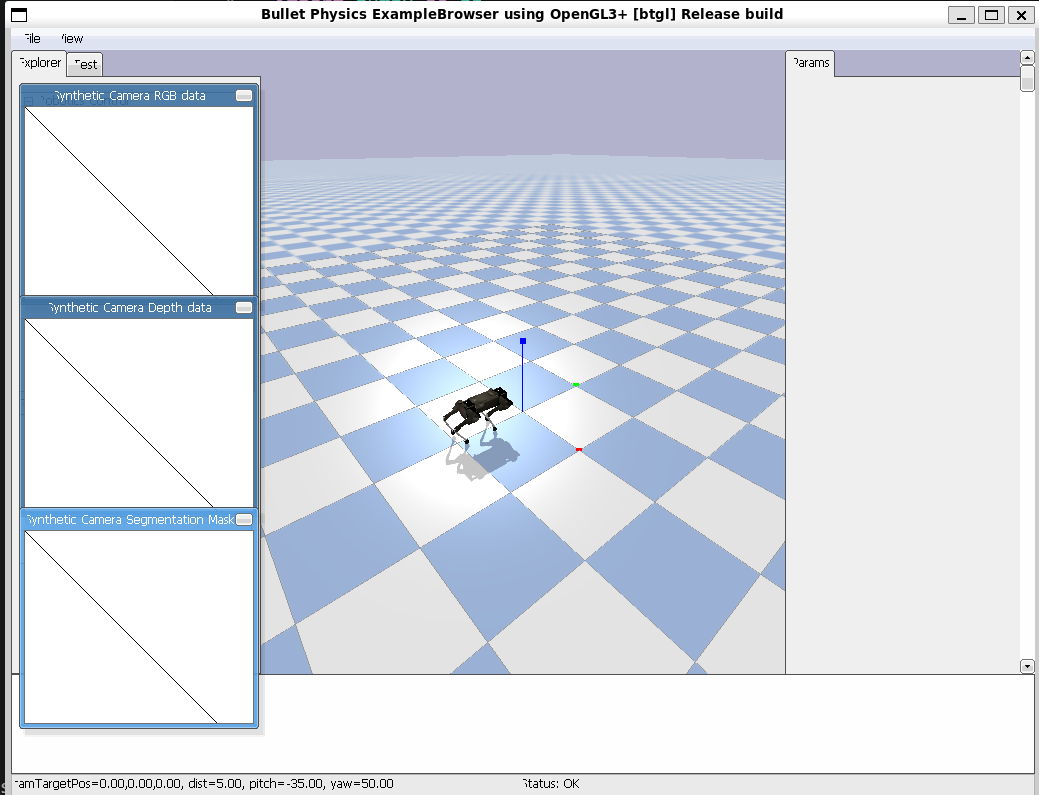 |
|  |
|
源代码
import pybullet as p
import pybullet_data
import time
import numpy as np
import math
class QuadrupedController:
"""简单的四足控制器"""
def __init__(self, robot_id):
self.robot_id = robot_id
# 关节ID(需要根据实际模型调整)
self.leg_joints = {
'LF': [0, 1, 2],
'RF': [3, 4, 5],
'LH': [6, 7, 8],
'RH': [9, 10, 11]
}
# 步态参数
self.stance_height = 0.3 # 站立高度
self.step_height = 0.05 # 抬腿高度
self.step_length = 0.1 # 步长
def trot_gait(self, t, leg_name, frequency=1.0):
"""
Trot步态生成
"""
# 相位(对角腿同相)
if leg_name in ['LF', 'RH']:
phase = 0
else: # RF, LH
phase = np.pi
# 步态周期位置
cycle_phase = (2 * np.pi * frequency * t + phase) % (2 * np.pi)
# 摆动相 vs 支撑相
if cycle_phase < np.pi: # 摆动相(腿抬起)
progress = cycle_phase / np.pi
x = self.step_length * (progress - 0.5)
z = self.step_height * np.sin(np.pi * progress)
else: # 支撑相(腿着地)
progress = (cycle_phase - np.pi) / np.pi
x = self.step_length * (0.5 - progress)
z = 0
# 逆运动学(简化版)
y = 0 # 横向位置
hip = 0
# 大腿和小腿角度(简化计算)
l_thigh = 0.2 # 大腿长度
l_calf = 0.2 # 小腿长度
target_height = self.stance_height + z
# 简化逆运动学
thigh = np.arctan2(x, target_height)
calf = -2 * thigh
return [hip, thigh, calf]
def step(self, t, frequency=1.0):
"""执行一步控制"""
for leg_name, joint_ids in self.leg_joints.items():
target_angles = self.trot_gait(t, leg_name, frequency)
for joint_id, angle in zip(joint_ids, target_angles):
p.setJointMotorControl2(
self.robot_id,
joint_id,
p.POSITION_CONTROL,
targetPosition=angle,
force=20
)
# 主程序
def main():
# 初始化
p.connect(p.GUI)
p.setAdditionalSearchPath(pybullet_data.getDataPath())
p.setGravity(0, 0, -9.8)
p.loadURDF("plane.urdf")
# 加载机器人
start_orientation = p.getQuaternionFromEuler([math.pi / 2, 0, math.pi / 2]) # Keeps the robot facing forward
robotId = p.loadURDF("laikago/laikago_toes.urdf", [0, 0, 0.5],start_orientation)
# 创建控制器
controller = QuadrupedController(robotId)
# 仿真
t = 0
dt = 1./240.
print("开始仿真,按Ctrl+C停止...")
try:
while True:
controller.step(t, frequency=0.5)
p.stepSimulation()
time.sleep(dt)
t += dt
except KeyboardInterrupt:
print("仿真结束")
p.disconnect()
if __name__ == '__main__':
main()
由于源代码运行的机器狗无法正常走路,以下是修改后的代码
import pybullet as p
import pybullet_data
import time
import numpy as np
import math
class QuadrupedController:
"""简单的四足控制器"""
def __init__(self, robot_id):
self.robot_id = robot_id
# 关节ID(需要根据实际模型调整)
self.leg_joints = {
"RF": [0, 1, 2],
"LF": [4, 5, 6],
"RH": [8, 9, 10],
"LH": [12, 13, 14],
}
# 步态参数
self.stance_height = 0.25 # 站立高度
self.step_height = 0.05 # 抬腿高度
self.step_length = 0.12 # 步长
def trot_gait(self, t, leg_name, frequency=1.0):
"""
Trot步态生成
"""
# 相位(对角腿同相)
if leg_name in ['LF', 'RH']:
phase = 0
else: # RF, LH
phase = np.pi
# 步态周期位置
cycle_phase = (2 * np.pi * frequency * t + phase) % (2 * np.pi)
# 摆动相 vs 支撑相
if cycle_phase < np.pi: # 摆动相(腿抬起)
progress = cycle_phase / np.pi
x = self.step_length * (progress - 0.5)
z = self.step_height * np.sin(np.pi * progress)
else: # 支撑相(腿着地)
progress = (cycle_phase - np.pi) / np.pi
x = self.step_length * (0.5 - progress)
z = 0
# 逆运动学(简化版)
y = 0 # 横向位置
hip = 0.15 * x
# 大腿和小腿角度(简化计算)
l_thigh = 0.2 # 大腿长度
l_calf = 0.2 # 小腿长度
target_height = self.stance_height + z
# 简化逆运动学
base_thigh = 0.55
base_calf = -1.1
thigh = base_thigh + 2.0 * x - 0.8 * z
calf = base_calf + 1.5 * z
return [hip, thigh, calf]
def step(self, t, frequency=1.0):
"""执行一步控制"""
for leg_name, joint_ids in self.leg_joints.items():
target_angles = self.trot_gait(t, leg_name, frequency)
for joint_id, angle in zip(joint_ids, target_angles):
p.setJointMotorControl2(
self.robot_id,
joint_id,
p.POSITION_CONTROL,
targetPosition=angle,
force=120
)
# 主程序
def main():
# 初始化
p.connect(p.GUI)
p.setAdditionalSearchPath(pybullet_data.getDataPath())
p.setGravity(0, 0, -9.8)
p.loadURDF("plane.urdf")
# 加载机器人
start_pos = [0, 0, 0.55]
start_orientation = [0.0, 0.5, 0.5, 0.0]
robotId = p.loadURDF("laikago/laikago_toes.urdf", start_pos, start_orientation)
# 创建控制器
controller = QuadrupedController(robotId)
# 仿真
t = 0
dt = 1./240.
print("开始仿真,按Ctrl+C停止...")
try:
while True:
controller.step(t, frequency=0.5)
p.stepSimulation()
time.sleep(dt)
t += dt
except KeyboardInterrupt:
print("仿真结束")
p.disconnect()
if __name__ == '__main__':
main()
经过修改的代码如下
# ==================== 源文件 py.py =====================
# 加载机器人
start_orientation = p.getQuaternionFromEuler([math.pi / 2, 0, math.pi / 2]) # Keeps the robot facing forward
robotId = p.loadURDF("laikago/laikago_toes.urdf", [0, 0, 0.5],start_orientation)
# ==================== 修改后 trot.py ====================
# 加载机器人
start_pos = [0, 0, 0.55]
start_orientation = [0.0, 0.5, 0.5, 0.0]
robotId = p.loadURDF("laikago/laikago_toes.urdf", start_pos, start_orientation)
Tips: 主要修改了机器狗的初始姿态和初始高度,尽管修改了代码,机器狗可以正常走路,但是是倒着走的,这也是需要进行进一步修改的地方。